HBRC has a prime goal of getting makers to build robots and show them as well as have some fun at the same time.
The Challenges are design patterns to inspire your answer to “what kind of robot should I build?”. The challenges are described in three phases to provide intermediate milestones toward building the best robot you ever made. Three months of the year, March, June, and September, the HBRC General Meeting is dedicated to participant’s demonstrating their robots ability to perform the challenges. The hope is for robots to successfully perform Phase I, II and III over the course of the three meetings. The reality is that robot building is as hard as it is fun and participants are encouraged to demonstrate whatever they can and share their stories of both hits and misses.
The challenges are meant to encourage members to BUILD ROBOTS!
The meetings with the challenges are not a high pressure situation but rather a way to get people to participate and share the bots they have built. Certificates for completing phases of the challenges are given and the participant’s name is entered in our book of records as a way to encourage participation and have a goal for builders. Click here to see the certificates participants have earned.
Robots must be autonomous to qualify for certificates but all robots are encouraged to take part in the challenges.
Here Are the Challenges And the Specific sub-goals for each type of challenge: Challenge Descriptions.
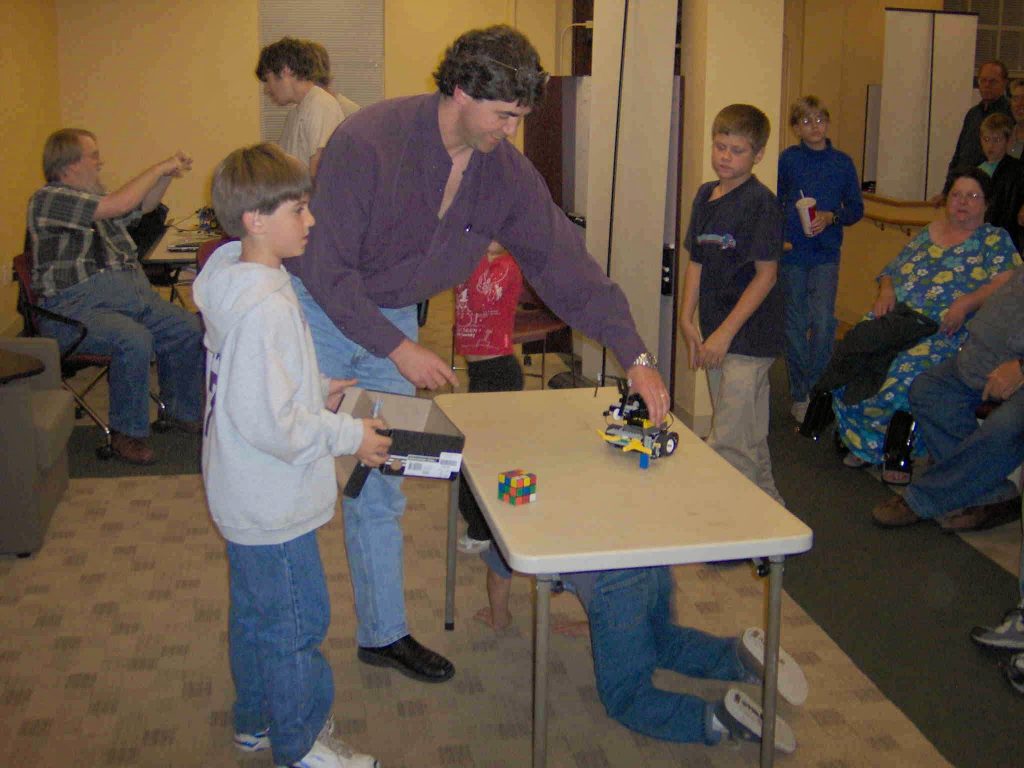
TABLEBot Challenge
A TABLEBot is a robot that survives, lives and plays on a table … or pays the price.
Phase I: Go from one end of the table to the other and back.
Phase II: Find and Push a block off the table.
Phase III: Find and Push the block into a shoebox mounted at the end of the table.
FloorBot Challenge
A FloorBot is a robot too big for the table.
Phase I: Go from one end of the room to the other and back.
Phase II: Find an object in the room.
Phase III: Fetch the object.
AI Challenge
An AI Bot utilizes advanced verbal and vision sensors.
Phase I: Have the robot verbally chat.
Phase II: Ask the robot to identify an object in the room visually.
Phase III: Have the robot manipulate the object.
A-Mazing LineBot Challenge
A LineBot follows lines to solve a maze and perhaps learn the maze.
Phase I: Autonomously find a way through the maze by following a black line on white floor tiles
Phase II: After finding a way through the maze the LineBot must do it again with no wrong turns
Phase III: Be able to do a maze with loop(s) and get out of the loops. Avoid loops on following runs.
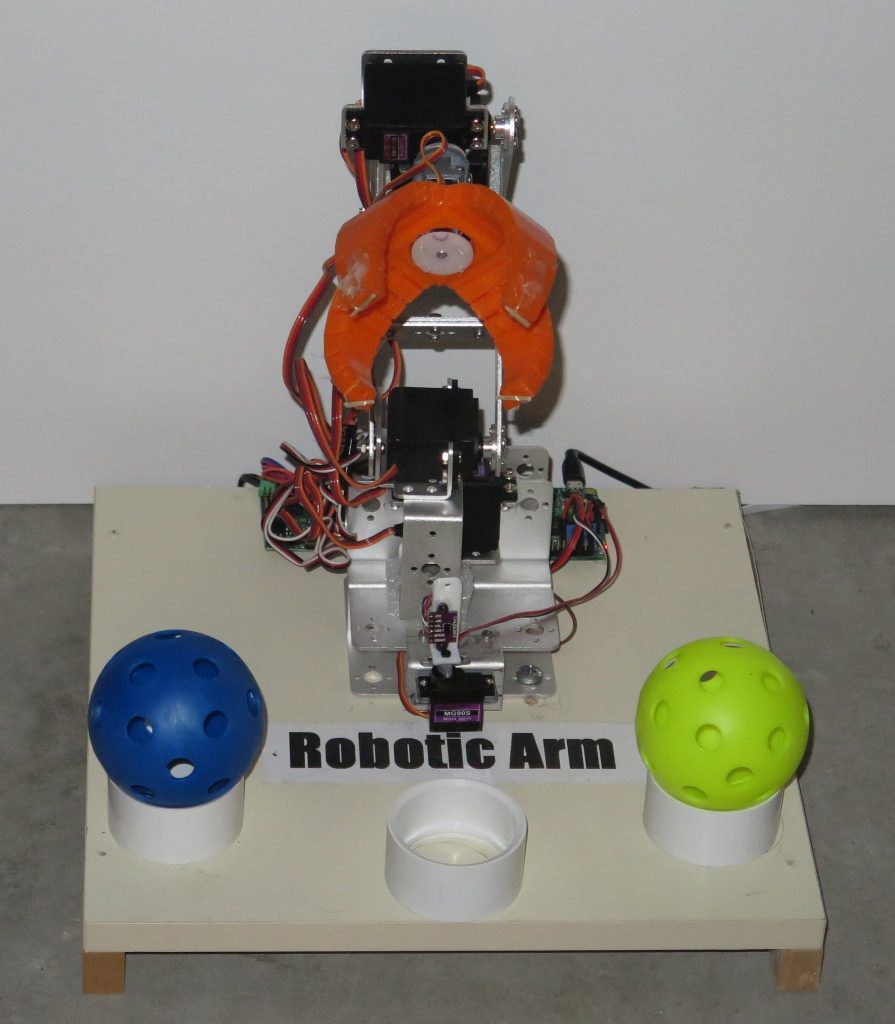
RobotArm Challenge
A robotic arm which may be fixed in location solves movement and grab/release.
Phase I: Build a robotic arm that moves or waves
Phase II: Pick up an object in a known location and move it to another location
Phase III: Pick up an object from an unknown location and place it in a container or known endpoint location
(You are encouraged to get creative beyond these phases and have the robot arm stack things as an example)
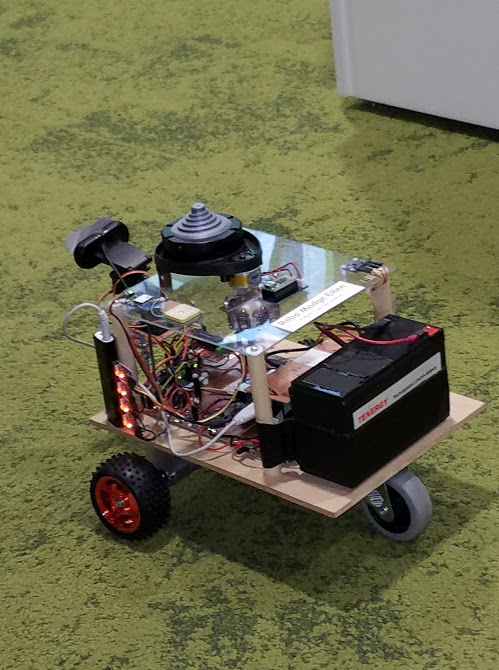
RoboMagellan Trials
An event to show bots destined to compete in the RoboMagellan Competitions
HBRC does not hold an official RoboMagellan competition itself but encourages bot builders to try this challenge.
These bots use GPS and other navigation sensors to find orange traffic cones placed on a large area such as a fairground where the non HBRC event is to be held. You may see the defined rules for the RoboMagellan contests at RoboMagellan Rules
Run-What-You-Brung!
Show your special one-of-a kind robot that is not designed for a specific challenge.
Phase I: Bring and show your robot finished or not. If a finished demo then spell out your Phase II and Phase III goals
Phase II: Bring your robot finished or not. If it is a finished demo define again your Phase III goal.
Phase III: Bring your finished robot and do the Phase III demo