The club has been meeting regularly since 1984. This archive is a new effort started in 2021. Announcements and discussions regarding prior meetings can be found in our mailing list archive and our YouTube archive.
January 29, 2025
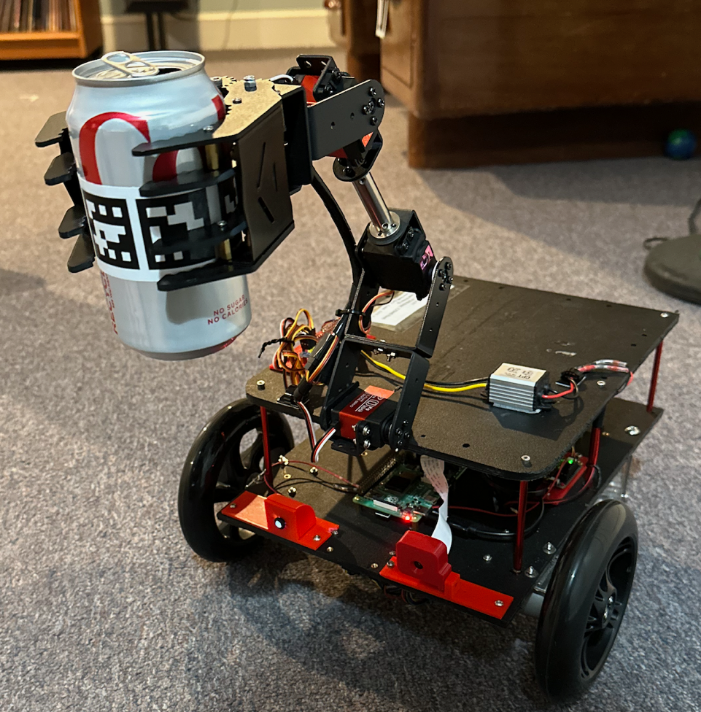
Main Presentation: Member Projects: ROS Repositories, Image Navigation using LLM and Lidar Navigation for the Blind
Video: TBD
Presentation #1
Topic: ROS Robot Repository for Turtle, Plucky, Dragger
Presenter: Sergei Grichine
Abstract: Go over the repository structure, run sims, and answer questions.
https://github.com/slgrobotics/articubot_one
Presentation #2
Topic: Image Navigation using LLM
Presenter: Thomas Messerschmidt
Abstract: Robo navigation via sending photos to a large language model AI.
Presentation #3
Topic: Lidar Navigation for the Blind
Presenter: Brian Higgins
Abstract: LiDAR Sensor Aided Navigation Smart white cane light, our sensors, and navigation for the blind on a two-wheel scooter
November 20, 2024
Main Presentation: Toborlife Robots
Video: TBD
Presenter: David Schulhof
Abstract: Toborlife is a master distributor for Unitree Robots in North America. They’re also developing autonomous control systems for robots. Tobolife’s first use case will be a security/patrol application for the quadruped (patrol dog) robot.
https://toborlife.ai

October 30, 2024
Main Presentation: Hackerbot
Video: TBD
Presenter: Ian Bernstein
Abstract: At this month’s HBRC meeting, Ian Bernstein will discuss his journey in robotics since building his first robot at the age of 12. He will share behind-the-scenes highlights of robot builds and projects he has worked on personally, at Sphero, at Misty Robotics, and elsewhere. Finally, he will talk about his new robotics company, Hackerbot Industries, which he founded in February 2024 to build low-cost platforms to advance robotics for all of us.
BIO: Ian Bernstein is the CEO of Hackerbot Industries and a serial entrepreneur in the robotics and AI space. Formerly, Bernstein was the Founder and Head of Product at Misty Robotics, a company which was focused on building platform robots for the home and front-of-business. Prior to Misty Robotics, Bernstein served as Founder and CTO at Sphero which has shipped more than 5 million robots to date including the app-controlled Sphero Star Wars BB-8.

August 28, 2024
Main Presentation: Teaching Robots: Chaos, Creativity, Success
Video: TBD
Presenter: Pito Salas
Abstract: Pito will speak about the challenges and learnings at Brandeis University, teaching Computer Science to undergrads and creating the Robotics course over the last five years.
BIO: Pito Salas: Pito has been active on the HBRC mailing list for a few years, discussing ROS navigation and other subjects as he teaches his students with a “hands-on” approach. Pito has been a Professor for the “Practice in Computer Science” at Brandeis University in Waltham/Boston, Massachusetts, for 12 years. His courses are robotics, software engineering, operating systems, and software entrepreneurship. He teaches two elective courses per semester to a mix of undergraduate and graduate students. His interest in robotics started years ago with an evolution of his software engineering courses. The Brandeis Computer Science faculty has approximately 20 professors. They are especially strong in computational linguistics, Machine Learning, and AI.
About Pito Salas
July 31, 2024
Main Presentation: Accelerate the Next Wave of AI Robots
Video: TBD
Presenter: Erin (Bishop) Rapacki:
Abstract: Everything that moves will one day be autonomous. Demand for autonomous machines and AI-enabled robots is at an all-time high as industries look to improve operational efficiency, combat workforce shortages, optimize repetitive tasks, and manage dangerous tasks or environments.
With major advancements in AI, accelerated computing, physically based simulation, and a vast ecosystem of sensors and actuators, today’s AI robots can easily adapt, learn, and perform complex tasks with precision.
Developers are using NVIDIA Robotics full-stack, accelerated cloud-to-edge systems, acceleration libraries, and optimized AI models to develop, train, simulate, deploy, operate, and optimize their robot systems and software. NVIDIA Robotics Adopted by Industry Leaders for Development of Tens of Millions of AI-Powered Autonomous Machines
BIO: Erin (Bishop) Rapacki: Sr. Developer Relations (DevRel) for NVIDIA Robotics Erin has 15+ years of experience in robotics, industrial automation, computer vision, and IoT. She is particularly known for her role in helping companies in robotics, computer vision, and machine learning adopt the latest tools from NVIDIA, a testament to her influence in the industry.

May 29, 2024
Main Presentation: Hobby Project to Industrial Grade – Safety Rated Systems for the Technology You Already Understand
Video: TBD
Presenter: Chuck Pitzer
Abstract: The fundamental technology for navigating from point A to point B is already well understood by your average robot hobbyist. What are the challenges in making the leap from a hobby level project to something that can safely be introduced into the market around humans? We’re going to briefly go over Risk Assessments, Performance Levels, and state-of-the-art safety rated controllers and sensors. By the end of this talk, you should have a roadmap that will help guide you along whenever you are confronted with robots that are deployed in industrial, residential, or commercial environments.
BIO: I currently serve as the Director of Hardware Engineering at Zebra Robotics Automation (formerly Fetch Robotics). In this role, I am responsible for the development, functional safety, certification, budgeting, and planning for the existing fleet of 100kg payload and 1500kg payload robots – and all new developments, including accessories. I also have served as a Director of Product Design, Principal Mechanical Engineer, and Senior Product Designer for Zebra Robotics, Fetch Robotics, Neato Robotics, Panasonic Avionics, Applied Minds, Raytheon, Boeing, and a few smaller heavy equipment manufacturers. My robots have appeared on nine seasons of BattleBots, CSI Cyber, Showtime’s Shameless, Disney’s LabRats, a Budlight SuperBowl “RoboBash” Commercial, Fox’s Breaking In, Discovery’s Killer Robots, and Spike TV’s Auction Hunters.

April 24, 2024
Main Presentation: Clearpath Robotics
Video: TBD
Presenter: Sam Tagliabracci
Abstract: Join Samuel Tagliabracci as he delves into the journey of Clearpath Robotics Inc., exploring its groundbreaking products and the mission to create robust robotics solutions.
Clearpath Robotics, Inc.
https://clearpathrobotics.com/
BIO: Meet Samuel Tagliabracci, a Complex Robotic Integration Software Specialist within Clearpath Robotics Inc., based in Waterloo, Canada. With a passion for technology and a goal-oriented mindset, Samuel brings a creative and adaptive intellect to navigate and troubleshoot challenges with finesse. Beyond his professional pursuits, Samuel’s enthusiasm for opportunities and achievements, coupled with a love for growth and knowledge, reflects his multifaceted approach to personal and professional development. Alongside his expertise in robotics and AI, Samuel enjoys various athletic activities, including soccer, snowboarding, and boxing.
February 28, 2024
Main Presentation: Commercializing your Robot with Robotics-as-a-Service (RaaS)
Video: TBD
Presenter: Tony Pratkanis
Abstract: It is easy to make a small fortune in robotics – simply start with a larger fortune. What if you want to actually make money with robotics? This talk will begin with an overview of the Robotics-as-a-Service (RaaS) business model and economics as well as examples of successful RaaS companies. Next, we will cover the production process and operational scaling challenges of RaaS companies, as well as an overview of some of the legal issues (such as FCC, UL/NTRL, safety-critical software certification, and data privacy laws). Finally, we will discuss some recent and upcoming innovations in RaaS.
BIO: Tony Pratkanis is a 20-year member of the Homebrew Robotics Club and a robotics consultant who has worked with over a dozen robotics companies in the Bay Area. He has a BS and MS in computer science from Stanford University and previously worked at Willow Garage on integrating planners into ROS for the PR2 mobile robot.
January 31, 2024
Main Presentation: Building the iRobot® Create® 3 Robot: Challenges and Solutions for ROS 2 Consumer Robotics
Video: TBD
Presenter: Alberto Soragna
Abstract: This talk explores the development of the iRobot Create 3 educational robot, focusing on the challenges and solutions when building a consumer robotics product with ROS 2. Discover how to run ROS 2 on resource-constrained hardware, cross-compile and install it on limited flash space, and fine-tune the DDS layer. The presentation includes anonymized user feedback, highlighting areas where users face challenges in ROS 2. Witness the exciting projects built on the Create 3 platform and learn how the community can simplify and improve ROS 2.
BIO: Alberto Soragna is a principal robotics engineer at iRobot with a background in robotics and artificial intelligence. Alberto has nearly a decade of experience with ROS, starting in 2014 with ROS Jade for his university projects and thesis on UAVs. Alberto’s initial work at iRobot centered on Software Architecture and exploring ROS 2 as a middleware for consumer robotics applications. He was the technical lead of the team responsible for implementing and deploying ROS 2 in millions of Roomba robots, and he presently serves on the ROS Technical Steering Committee. Alberto’s current role within the iRobot Advanced Development organization focuses on constructing applications and robot behaviors on top of ROS 2.
Slide Deck: ros.org
November 29, 2023
Main Presentation: Dr. Zeno’s “Edu-AMR”
Video: https://youtu.be/hKGeR576OZE?si=J7NbC3A8LSUUQ0S_
Presenter: Dr. Peter Zeno
Abstract: Edu-AMR
ZenoRobotics, LLC: https://www.zenorobotics.com/product-page/edu-amr
BIO: Dr. Peter Zeno has worked in industry as an electrical engineer for the past 30 years. He has worked for the DOD/DON as an electronics engineer for warfare simulations involving the F14 and F18 aircraft radar systems and avionics, which were integrated into the simulation loop. After this, Dr. Zeno worked with several top U.S. Defense contractors, including Raytheon and Lockheed Martin. He has performed hardware design, testing, and system integration at those positions. Additionally, he developed FPGA design code for MIT LL, University of California – Davis (genome sequence alignment application), and FPGA/ASIC verification environments while at Synopsys, Inc.
Currently, he is working on getting his robotics startup company ZenoRobotics LLC successful while performing freelance work on embedded systems, FPGA design for high-speed financial trading, as well as software (Python and C++) work.
October 25, 2023
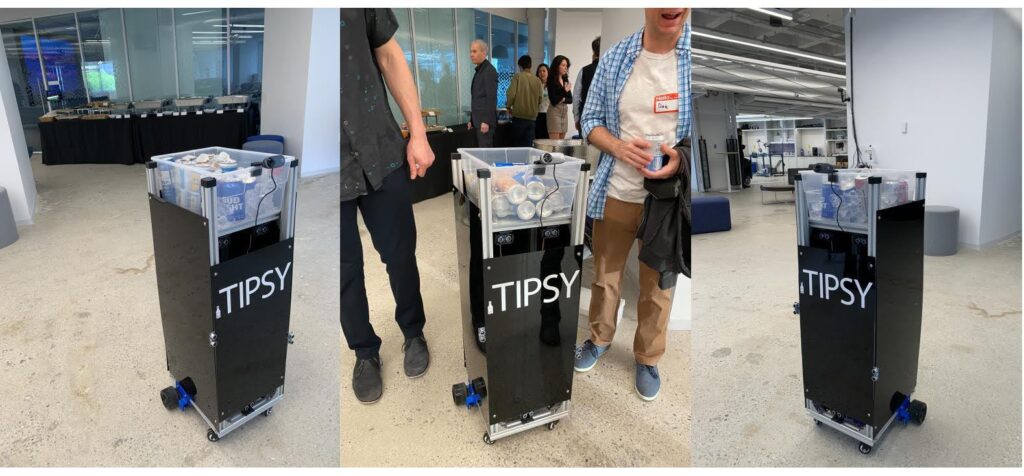
Main Presentation: Build robots with Viam
Video: https://youtu.be/Mj8KPAEa7Hs?si=ssl1Ig0mElaWUQEw
Presenter: Hazal Mestci
Abstract: Learn how to create an autonomous drink delivery robot! Designed with ultrasonic sensors and cameras, Tipsy is equipped to detect the presence of obstacles and people in its surrounding area. While avoiding the obstacles with the ultrasonic sensor distance measurements, it identifies the people using an ML model and object detection and moves towards them with ease. Tipsy allows people to grab a drink without ever having to leave their spot by bringing a bucket of ice-cold drinks within arm’s reach.
Bring Your Robotic Ideas to Life: https://www.viam.com/try-viam-robotics-software
BIO: Hazal Mestci is a Developer Advocate at Viam. Her day-to-day involves building fun robots and smart machines, coding, wiring hardware, and leading initiatives to engage, educate, and inspire developers through compelling content, workshops, and events.
August 30, 2023
Main Presentation: The Growing Need for Robot Orchestration
Video: TBA
Presenter: Florian Pestoni, CEO & Co-founder, InOrbit
Abstract: Robotics users across industries increasingly rely on automation to remain competitive and respond to existential threats. Logistics and supply chain companies are at the forefront of integrating autonomous robots into their operations. However, as they add more robots across sites and for a growing number of tasks, they are facing increased complexity and coordination issues that jeopardize the productivity gains that can be achieved through these solutions.
Robot developers should focus on their resources towards specific solutions to ensure their robots operate optimally rather than trying to do everything themselves. Expecting a single manufacturer to develop and commercialize robots for every possible use case is just not feasible.
There has been some progress recently on emerging interoperability initiatives for mobile robots, but these efforts have yet to achieve broad adoption and are only part of the solution. What robot users actually need is scalable, multi-vendor orchestration.
This presentation and live demonstration will explore the current state of interoperability, specific use cases for robot orchestration, and the role RobOps plays in the future of automation.
InOrbit robotspace: https://www.inorbit.ai/robotspace
BIO: Florian is an accomplished leader with hands-on experience in bringing innovative products to market. As InOrbit’s CEO and co-founder, Florian leads strategy, fundraising, and go-to-market activities. He is passionate about raising awareness around the new category of RobOps, sharing his compelling vision for the evolution of robotics and the future of work. He is also a co-founder of the Robot Operations Group, a community-led organization of experts in scaling robot deployments. Florian is an investor, advisor, board member, and mentor to young startup founders.

July 26, 2023
Main Presentation: Planning for the Future of Robotics
Video: Video
Presenter: Tony Pratkanis
Abstract: During the last two decades our understanding of the Moon has changed. What we once saw as a fairly uniform, bone-dry environment has been shown to harbor water and other volatiles in the polar regions. However, many questions remain about the nature, distribution, and origin of the water. It is also uncertain how easy it might be for future missions to utilize available water and other volatiles to reduce reliance on transport of materials from Earth. The VIPER mission will land a rover on the south pole of the Moon in 2024, with the goal of mapping the availability of water and other volatiles, and answering questions about their nature and distribution. This talk will give an overview of the VIPER mission, a presentation of the unique mission challenges and the robotic architecture to enable the mission, and a discussion of the simulation tools that are used to develop and refine the software and procedures that will ensure mission success.
BIO: Tony Pratkanis is a 20-year member of the Homebrew Robotics Club and a robotics consultant who has worked with over a dozen robotics companies in the Bay Area. He has a BS and MS in computer science from Stanford University and previously worked at Willow Garage on integrating planners into ROS for the PR2 mobile robot.
Tony’s Slide Deck
June 28, 2023
Main Presentation: NASA’s VIPER Mission Overview and 21st Annual HBRC Challenge Phase II
Video: Video
Presentation: NASA’s VIPER Mission Overview
Presenter: Mark Rose
Abstract: During the last two decades our understanding of the Moon has changed. What we once saw as a fairly uniform, bone-dry environment has been shown to harbor water and other volatiles in the polar regions. However, many questions remain about the nature, distribution, and origin of the water. It is also uncertain how easy it might be for future missions to utilize available water and other volatiles to reduce reliance on transport of materials from Earth. The VIPER mission will land a rover on the south pole of the Moon in 2024, with the goal of mapping the availability of water and other volatiles, and answering questions about their nature and distribution. This talk will give an overview of the VIPER mission, a presentation of the unique mission challenges and the robotic architecture to enable the mission, and a discussion of the simulation tools that are used to develop and refine the software and procedures that will ensure mission success.
BIO: Mark Rose has been a software designer and developer in the Intelligent Systems Division at Ames Research Center in Mountain View since 2005. He has done work for a variety of projects and missions, including advanced telemetry display systems for manned spaceflight mission control at Johnson Space Center, tools to facilitate data discovery and data archiving for NASA’s Planetary Data System, and the TESS exoplanet search mission, as well as VIPER. Prior to joining NASA he worked at a variety of local startups.
VIPER Mission Overview
https://www.nasa.gov/viper/overview
21st Annual HBRC Challenge Phase II
This is your part of the meeting, so get your robot running.YOU are responsible for the presentation. Get your robot, take it off the shelf, dust it off, charge it up, fix it, finish it, make it better. We have various Challenges in which you can participate: hbrobotics.org/challenges/ or do your own thing with Run-What-You-Brung! We are a builders club! Our stock in trade is functioning robots, but works-in-progress are good for partial credit. Don’t be a spectator; participate! This is your opportunity to create.
May 31, 2023
Main Presentation: Exploration of Robot Intelligence
Video: Video
Abstract: Martin Triplett will describe his exploration of robot intelligence with his customized simulation environment. He has a simulation environment where he works out several required aspects of intelligent capabilities. His talk will focus on the five stepping stones to robot intelligence. The autonomous robot playing the piano signifies a Turing Machine and the orchestration of all the complex state changes (keys) necessary to run the robot. Much of the discussion will be spent in the simulator, showing and discussing how various behaviors were built and work.
Piano Robot: https://photos.app.goo.gl/X8wwtPRcUXs54ymE8
Simulator: https://photos.app.goo.gl/egXPRbFETSxbD19cA
March 29, 2023

February 22, 2023
Main Presentation: Robot Product Development
Video: Video
Abstract: In this presentation based on years of developing numerous robotics products for companies across the world, Ted Larson, CEO of OLogic, a Silicon Valley-based robotics design and development services firm, will outline the steps in his Guerilla Product Development program, a novel engineering approach for developing robotics systems. During the session, he will discuss the concepts underlying the product development technique and provide specific examples of how the process has been used for the development of various robotic and consumer electronics products. Specifically, he will detail how the approach was utilized for the design of the commercial robotics offering from Dusty Robotics.
January 25, 2023
Main Presentation: Turn a Smartphone into a Programmable Robot
Video: Video
About Michael from VoltPaperScissors: Michael is a passionate maker and game designer who teaches kids about electronics. He works in maker spaces where they have a ton of materials and tools to tinker around with. However, he was always super excited to make electronics more accessible to everyone. So he created Volt, Paper, Scissors! to share creative maker projects that only use paper and simple electronics.
Fritz, the Simple Paper Circuit Smartphone Robot: https://www.voltpaperscissors.com/diy-smartphone-robot
Michael invented Fritz to showcase how powerful simple paper circuits can be when used creatively. He also wanted to offer a cheap and easy alternative to expensive robotic toys. But the real motivation always came from his excitement and the challenge to make it work. He designed printable templates and video tutorials to make it work for himself and everyone. To make the process of recreating it enjoyable for kids, he made the robot modular so that kids can start with a simple robot and upgrade it step-by-step.
For programming Fritz, Michael still has many ideas to try and publish, including integrating voice commands, the text-to-speech engine, and the compass for precise navigation.
The YouTube video currently has has 18000 views, and this project gets the most (positive) feedback of all Michael’s projects. The concept is especially interesting to developing countries that can’t afford more expensive solutions. Currently, people from Uganda and Nigeria are planning to bring this concept to schools. He will be supporting these initiatives with workshops and a curriculum on robotics. He also knows that people from different countries use his work to teach robotics.
November 30, 2022
Main Presentation: Freenove Robot Dog
Presenter: Mark Johnston
Video: Video
Abstract: RoboDoggie is an Animatronic dog based on the Freenove Robot Dog Kit found on Amazon.
We will demo and explain RoboDoggie. This robot puppy is an enhanced build of the Freenove Robot Dog kit with several enhancements including speech I/O with speech command recognition. RoboDoggie can perform several tricks and actions from voice commands.
RoboDoggie has a Raspberry Pi 4 on Ubuntu 20.04 image with ROS all intact. A slide presentation will be presented along with a demo in a live HBRC demo.

September 28, 2022
Main Presentation: 20th Annual HBRC Challenge Phase III
Video: Video
Photos: Photos
Zoom Chat: chat.txt
Summary / Decompression: Fourteen presenters, 20 robots! 14 in person at Maker Nexus, 30 on Zoom! Below are notes, images, and the YouTube video.
- John Erickson and John Carlini: Demon, Mr. T, & Zeno. Mobile Base and Burning Man Robot.
- Scott Monaghan – RoBud – Follow and find. FloorBot Challenge Phase II.
- James Phelan – AUDACITY, NASA Mars Rover.
- Ross Lunan – Botvac, FloorBot Challenge Phase I.
- Brian Kostke – Black Adder, RobotArm Challenge Phase I.
- Shaunabh Bose – Tabletop Robot, TABLEBot Challenge Phase I.
- Mark Johnston – RoboDoggie, Run-What-You-Brung!
- Marco – EntdeckerL (RoboMagellan), FloorBot Challenge Phase I. Sawppy, ROS joystick teleop. Dancing Android Robot.
- Thomas Messerschmidt – Mouse, Star Wars repair droid. Masked Robot, mecanum wheels.
- D.D. – Dancing Dolls, RobotArm Challenge Phase I.
- Jim – Big Orange, FloorBot Challenge II.
- Camp – Buggy, TABLEBot Challenge Phase III Neato Turtle, FloorBot Challenge Phase I, KerBit, RoboMagellan.
- George – HomeBrewed CNC mill.
August 28, 2022
Main Presentation: Building Ro-Bud
Video: Video
Presenter: Scott Monaghan
Abstract: Ro-Bud is Scott’s lovable, accessible, autonomous social bot that has been in progress for about a year. In this presentation Scott will detail the hardware and software stack chosen for Robud, and the reasons and challenges when making that choice. The goal is to share with the HRBC group such that they are better informed on whether or not to implement these technologies into their own projects.
Some of what will be covered:
- ROS or not ROS, that is the question
- Mosquitto MQTT (like ROS topics)
- System-d services (like ROS nodes)
- Choosing nVidia Jetson Nano over Raspberry Pi4
- Animated displays with pygame
- Directional Audio & Speech Detection (Seeed ReSpeaker v2)
- Audio Challenges with pyAudio & PulseAudio
- WakeWord Detection with MyCroft Precise
- Text to Speech & Speech to Text (e-speakng & Coqui STT)
- Power Challenges: 6 amps, 2 isolated 5v outputs, 12v outputs from one power brick
Ro-Bud’s GitHub repository: https://github.com/ScottMonaghan/robud
July 27, 2022
Main Presentation: 3D Printing Roundtable
Video: Video – Coming Soon
Presenter: A series of short presentations by HBRC members including:
- Kevin Chow <kvnchowx@gmail.com> – Ender 3 Pro, CAD, LX-224 servo bracket, WIP robot, coil
- Al Margolis – OpenSCAD
- Scott Monaghan – Tinkercad
- Stephen Williams – Fusion360, Ender 3 Pro, IDEX printers, 3D printer developments – open source, Ender 3 Neo
- Chris Albertson – Fusion360
- Lurene Davis – 3d printing journey building her humanoid Inmoov
- D.D. – Robots I designed (Fusion 360) and printed
Abstract: 3D printing for robotics can look easy, seem simple in theory, but usually involves a lot of trial & error, preparation, frustration, and patience to get useful results. There are many printer options, filament material, dozens to hundreds of slicing & printing parameters to tune, and you need an interesting model you can tweak to print. Sometimes you can download & print something, but for robotics, you are going to want to create your own 3D models. A number of popular commercial packages cost thousands, often with no free or inexpensive hobbyist version, and may only run on Windows. Several open source & commercial options are available that are free, free in certain cases, or very modestly priced. We will discuss these: how to get started, pros / cons.
June 29, 2022
Main Presentation: 20th Annual HBRC Challenge Phase II
Video: Video
Camp’s Photo Library: Photos
Certificates: Certificates Awarded
Summary / Decompression:
- Rohan Agrawal – TABLEBot. Phase I. un-named robot
- Bob Glicksman – FloorBot Phase I. un-named robot 3D printed head with moving eyeballs, which kept saying “Back off man, you’re too close”
- Paul Faria – Octopod. Work-in-progress. un-named robot
- Al D’Silva – Quadruped. Work-in-progress. “Doggo”
- Camp Peavy – TABLEBot Phase III. “Buggy” RoboMagellan Trial. Work-in-progress. “Kermit” Botvac navigating. Work-in-progress
- Brian Kostka – snake robot. “Black Adder”
- Ralph Hipps – shared some test result dataAnnounced – Sept 10 for “BotNic”
- Scott Horton – New Base for Elsabot2. Work-in-progress
- Thomas Messerschmidt – Simone – Phase II – artificial personality
- Jim DiNunzio – parts – radar. “Big Orange” Level 2 floor bot. VOSK voice recognition
- Will Sokol – Balancing Bot
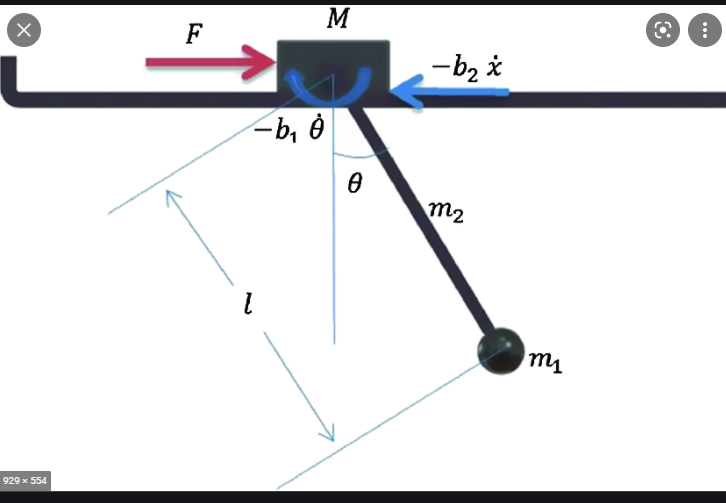
- Tom Bertalan – Simulations. Pendulum – post-doc analysis
- Scott Monaghan – with tracks, went over a hammer. “Ro-Bud”
May 25, 2022
Main Presentation: Ava Robot Project
Presenter: Martin Triplett
Video: Video
Zoom Chat: chat.txt
Slides: Slide Deck (400MB PowerPoint pptx file)
Abstract: Martin will introduce Ava, a custom metal and 3D printed, 22 degree of freedom talking robot with a moving core and functional arms. Topics will include her origins, design, construction, major systems, and custom software architecture. This will include an overview of her custom “neural net of neural nets” based brain architecture and how she “thinks” and is largely programmed in Avascript…also known as English. Martin will then show how this architecture was extended to incorporate custom neural nets, fuzzy logic, 2D & 3D vision, off-the-shelf models, kinematics, SLAM, and a few advanced sensor fusion techniques. Ava may jump in and present some portions. Videos will also be shown.
Bio: I was an enterprise software architect by trade for what is now Accenture and many Fortune 500 companies. In the Bay Area, I was the technical lead for major projects at The Gap, Banana Republic, Old Navy, and multiple projects at Visa, State of California, and others. I built software frameworks that specialized in eliminating 99% of the code for large teams. I bring this perspective to my robots.
I retired from consulting in 2005, started a real estate business, and started writing mobile software. Around 2012 I started into robotics and have been hooked ever since. This almost brought me back to the bay area when Huawei became interested in buying the software for my first bot, Anna, to use for robots and a personal assistant on their phones.
Most of my bots have a verbal focus. My bots have been featured on LMR, DFRobot, and Hackster.
April 27, 2022
Main Presentation: Linorobot Project
Presenter: Juan Miguel Jimeno
Video: Video
Zoom Chat:
Abstract: Juan is the leader of the Linorobot project: https://linorobot.org/. They also have a ROS2 version: https://github.com/linorobot/linorobot2. He is currently focused on legged robot research: https://github.com/chvmp/champ.
March 30, 2022
Main Presentation: 20th Annual HBRC Challenge Phase I
Video: Video
Summary / Decompression: What a great show last night! 16 robot-builders 19 robots. I somehow missed the ever-popular Ralph Hipps, so here is a link to his RoboMagellan robot Blackbeard (https://www.youtube.com/shorts/8JE6-mPOGy8) and floorbot (https://www.youtube.com/shorts/96nMtcojDMo)
Special thanks to Damaris Davis (DD) and Scott Monaghan for taking the pictures and Big Al Margolis for all he does.Certifications:
- Mark Womack: Beatrice/TABLEBot Phase II
- Camp Peavy: Buggy/TABLEBot Phase III, Neato Turtle/FloorBot Phase I
- Michael Ferguson: UBR-1/FloorBot Phase I
- Ross Lunan: Nanosaur/Run-What-Ya-Brung! Phase I
- Scott Horton: Elsabot/Arm Challenge Phase III
- Thomas Messerschmitt: Fetch a Beer/Arm Challenge Phase II
February 23, 2022
Main Presentation: Robots in Space and for the Earth
Presenter: Kristian Mueller
Video: Video
Zoom Chat: chat.txt
Bio: Kristian Mueller is Impossible Sensing’s Director of Programs. He’s a former NASA roboticist with 20+ years of experience in the aerospace sector in both, manned and unmanned space technology. He’s helping to develop next-generation optical sensing applications for the most extreme terrestrial and extraterrestrial environments. In other words, making the impossible possible.
Main Presentation: Behavior Trees for ROS
Title: Behavior Trees for ROS, A Gentle Introduction
Presenter: Michael Wimble
Video: https://www.youtube.com/watch?v=xLojvuXAQcU
Zoom Chat: chat.txt
Abstract: I will introduce behavior trees and show how they can be useful for expressing complex behavior in robotics while accommodating safety and efficiency requirements. I will start with a simple requirement, such as moving a robot so that it is near a wall and expand the behavior to handle fallback strategies and avoid collisions. I will show you how to create the necessary custom code in C++ to deal with sensors and motors and show you how to visualize and debug your behavior trees.
November 17, 2021
Main Presentation: My First ROS2 Robot
Presenter: Ralph Gnauck
Video: https://www.youtube.com/watch?v=q4cmSkRxps0
Zoom Chat: chat.txt
Abstract: The talk will review the current state of ROS2, what works, what doesn’t, what to know when migrating to ROS2. I’ll demonstrate the packages and run a robot simulation to show what can be done out of the box with ROS2.
Bio:Ralph Gnauck has been developing ROS robots for play and professionally for nearly 10 years. Ralph has contributed to the Neato Botvac ROS packages and was involved with team ‘Maxed Out’ for the NASA Centennial Robot Challenge.
He works by day as a consultant for OLogicinc.com helping startups and other companies developing ROS robots and other electronics goodies.
October 27, 2021
Main Presentation: Bayesian Recognition
Presenter: Chris Mayer
Video: https://www.youtube.com/watch?v=zENUynrAWpE
Zoom Chat: chat.txt
Abstract: In part 2 of my Talk on AI, I will give a quick recap of Part 1 and Genetic Algorithms, and move on to Bayesian Recognition.
By the end of this talk you will be able to define a problem, create a feature vector, find the optimal feature subset, and classify unknown objects. Understanding Bayesian Recognition will also provide a useful reference point into what is going on inside Neural Networks, which will be covered in a future Part 3 talk.
The Talk on AI Part 1 can be found on HBRC’s YouTube channel from July 2018, broken up into 6 segments. https://www.youtube.com/watch?v=IpJl3ODtQSM
September 29, 2021
Main Presentation: HBRC Challenge: 2021 Phase III
Video: https://www.youtube.com/watch?v=xEjbK-b3Z-I
Zoom Chat: chat.txt
Camp’s Photo Library: Photos
Meeting Notes: Decompression
August 25, 2021
Main Presentation: Controls for Mere Mortals
Presenter: Chris Tacklind
Bio: Chris has been the technical lead in several start-ups in a wide range of industries from medical devices to robotics and transportation. He is a prolific inventor with dozens of patents in many fields. He is particularly passionate about Electro-Mechanical Design, Education, and now, Modern Control Theory and Practice.
Title: My struggle to get beyond PID controllers and why I’m so excited about it.
Video: https://www.youtube.com/watch?v=1sSmTWue2Sw
Zoom Chat: chat.txt
Meeting Notes: SlideDeck.pdf
Abstract: Many of us have had the pleasure of implementing a PID controller on a robot, and it is a pleasure.
- Stacking position loops gets us familiar robotic motions
- How are the “gurus” at Boston Dynamics and MIT getting such complex and beautiful results?
- Where does one get started?
- This talk is intended to share my own struggles and insights
- Five or so key ideas will be introduced with some detail, how they fit together, and examples
- Can these ideas be applied to “simple” robots?
- Hopefully this will give the audience some visceral understanding of each, and where to go next on your own journey
- A modest hardware demo will be included

July 28, 2021
Main Presentation: MTEK
Presenter: Tord Johnson
Title: Teaching an off-the-shelf collaborative robot to learn from its earlier mistakes, acquire touch-and-feel and become the main data gateway for a production line.
Video: https://www.youtube.com/watch?v=Cd0Bx7WkJKs
Zoom Chat: chat.txt
Meeting Notes: SlideDeck.pdf
Abstract: The presentation will let you follow MTEKs (https://mtek.se/) journey on how we took an off-the-shelf robot and provided it with advanced capabilities by creating specialized software solutions. Both inside the robot for immediate feedback (hot path) but also by backhauling data to an analytics platform where production, product and capability data could be handled (cold path). This allowed our customers to performed advanced small parts assembly for advanced mechanical parts and electronic though hole assembly. Increasing the assembly speed and make significant savings on their operational cost.

May 26, 2021
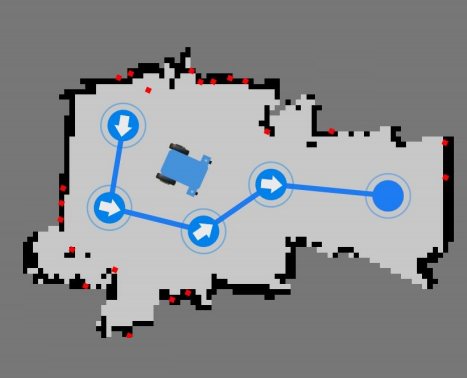
Main Presentation: EZ-Map – Maps & Nav Made EZ
Presenter: Mark Johnston
Meeting Notes: EX-Map_Slideshow
Abstract: A map was made using EZ-Map on a Magni robot from Ubiquity Robotics that runs using ROS. Lidar was used as the sensor and EZ-Map automatically made a map and then a route with goals was played back using simple controlled in this intuitive web GUI provided by the robot. EZ-Map is a web app on top of the LaMa Lidar based Nav stack all on ROS.
April 28, 2021
Main Presentation: Dusty Robotics in the Real World
Meeting Notes: Dusty@HBRC.pdf
Abstract: Presentation by engineers from construction robot manufacturer Dusty Robotics.
In war, it is said that no plan survives contact with the enemy. In robotics, it’s much the same except the enemy is the real world. Dusty Robotics development engineers will tell stories from the front lines of what it takes to evolve a robot from early naive assumptions to a functioning system that performs valuable work in the real world. Along the way, they will make the case for early and continuous testing of assumptions, critically evaluating results and the value of iterating prototypes with customers. Their experience should be useful to other hobbyists and entrepreneurs looking to turn their robots loose in the real world as well.
The primary speakers for this presentation will be Mike Thompson and Clemens Drews, but others will participate as well.
March 31, 2021
Main Presentation: HBRC Challenge: 2021 Phase I
Meeting Notes: Pictures, links and comments.
Camp’s Photo Library: Google Photos
February 24, 2021
Main Presentation: OHMNILABS
Abstract: https://ohmnilabs.com/
January 27, 2021
Main Presentation: iRobot
Presenter: Chris Kruger
Abstract: Chris is the Director of Software Engineering at iRobot. Chris has many years of hands-on software experience, architecting, developing, and debugging from silicon to the cloud. He’s worked in high-level positions at HP, Intel, and Motorola before coming to iRobot. He is passionate about robotics and comes to this position as a maker. He will talk about the history of iRobot, their consumer and educational divisions, the latest products, future products, the Smart Home innovation program, and the process of robot software development.
November 18, 2020
Main Presentation: eCarnival (My Robot Summer)
Presenters: Ted Larsen, Meghan Ignatowicz, Kyle Rodrigues, Ralph Gnauck, Wayne Gramlich
Abstract: eCarnival (My Robot Summer) was a group project at OLogic for summer interns to design, fabricate, and program robots over the summer with help from some more experienced HBRC folks. In this talk, the eCarnival concept is presented along with some of the robots that were designed. The robots used the Pololu Romi base as the common platform. The eCarnival concept is worthy of pursuing as a future HBRC activity.